PINNED - Roboteq Controller - developing for powerchairs
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 00:57
by Vitolds » 24 Jan 2017, 00:57
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 01:06
by Burgerman » 24 Jan 2017, 01:06
Try it. You wont understand till you try driving it...
-

Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 24 Jan 2017, 09:26
by LROBBINS » 24 Jan 2017, 09:26
Funny thing. The same issue came up years ago on the WCJ site and it had nothing to do with coding as it involved a "standard" chair. It took that person many exchanges of messages to understand that a wheelchair doesn't steer the same way as a car!
- LROBBINS
- Posts: 5553
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 10:01
by Vitolds » 24 Jan 2017, 10:01
Left is left
right is right
wheelchair so is controlled by.
you do not have solved the problem!
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by woodygb » 24 Jan 2017, 10:04
by woodygb » 24 Jan 2017, 10:04
Niels Bohr
-

woodygb - Posts: 7070
- Joined: 12 Mar 2011, 18:45
- Location: Bedford UK
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 10:14
by Vitolds » 24 Jan 2017, 10:14
problems you have with your code
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 11:34
by Burgerman » 24 Jan 2017, 11:34
Theres no problem to solve. If you DO solve it, you made a real bad problem!!!
What vehicle is this going in???
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 13:09
by Vitolds » 24 Jan 2017, 13:09
I wanted to experience your control.
you
left - go the right
right - go the left
your control is good when high speed. Only when you go forward.
would do so
100 -30 % - your control
30 - 0 % - control wheelchair
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 13:17
by Burgerman » 24 Jan 2017, 13:17
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 24 Jan 2017, 13:30
by LROBBINS » 24 Jan 2017, 13:30
Go sit in any marketed power chair and feel what it does - AND DO THINK ABOUT WHERE YOUR NOSE IS MOVING - is it moving further to the right with right stick both going forwards and going backwards? If so, that is correct. Your design should do the same thing. Remember, a joystick is not pointing in a given direction, the way a car's steering wheel does things. It is saying - "turn further to the right at rate x, or turn further to the left at rate x". The angle you end up at actually involves an integration of "steering" over time; it's very different from an automobile (and more like the ailerons of an airplane).
- LROBBINS
- Posts: 5553
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 13:44
by Vitolds » 24 Jan 2017, 13:44
I want to go backwards where Joystick reveals
this is the correct control
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 16:22
by Burgerman » 24 Jan 2017, 16:22
ALL of these and every wheelchair rotate ANTICLOCKWISE with LEFT stick. CLOCKWISE with right stick. As seen from above. Anything else would be undrivable!
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 16:54
by Vitolds » 24 Jan 2017, 16:54
tracked chair everything is fine, set up of Lithium batteries, suspension, shock absorbers.
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 24 Jan 2017, 19:37
by LROBBINS » 24 Jan 2017, 19:37
- LROBBINS
- Posts: 5553
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 20:56
by Burgerman » 24 Jan 2017, 20:56
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 24 Jan 2017, 23:42
by Vitolds » 24 Jan 2017, 23:42
I see the difference!
Your smooth control over
I have roboteq!
- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 24 Jan 2017, 23:47
by Burgerman » 24 Jan 2017, 23:47
is not tracked chair.
What is it?
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by funkykeyboard » 18 Feb 2017, 12:14
by funkykeyboard » 18 Feb 2017, 12:14
- funkykeyboard
- Posts: 1015
- Joined: 22 May 2010, 15:45
- Location: Southport, PR8
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 18 Feb 2017, 12:28
by Burgerman » 18 Feb 2017, 12:28
You want the newest firmware installing, and the matching roboteq software.
Then install the newest script that I am using. But its acceleration/deceleration levels and other settings etc will need figuring out as I only tested this latest version in the small bot so far. So maybe 5x lower or more. Or you will loop it/break it. But script is good.
download/file.php?id=5867
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 18 Feb 2017, 17:08
by LROBBINS » 18 Feb 2017, 17:08
- LROBBINS
- Posts: 5553
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 18 Feb 2017, 18:22
by Burgerman » 18 Feb 2017, 18:22
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Vitolds » 05 Mar 2017, 20:42
by Vitolds » 05 Mar 2017, 20:42
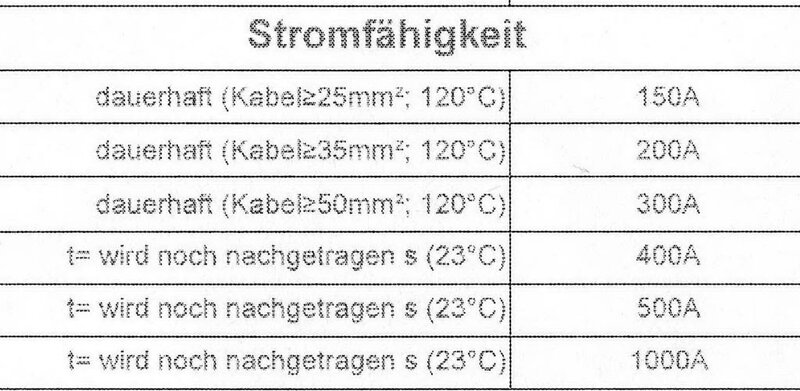
Mercedes A 003 542 18 19 (Gruner 750H 12V/1000A)
perhaps it will be useful




- Vitolds
- Posts: 531
- Joined: 26 Mar 2014, 22:12
- Location: Moscow Russia
Re: Some thinking and questions about Roboteq
![]() by Dannyboy » 10 Mar 2017, 11:30
by Dannyboy » 10 Mar 2017, 11:30
- Dannyboy
- Posts: 6
- Joined: 30 Oct 2012, 00:58
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 10 Mar 2017, 11:54
by Burgerman » 10 Mar 2017, 11:54
But you will need to choose in the roborun software suitable inputs for:
DIGITAL OUT:
Brake (I use one for both brakes via a solid state relay)
Brake 2 if not as above
Status LED
Battery low
ANALOG IN:
Left Current sensor
Right current sensor
Joystick forw/rev
Joystick left/right
Speedpot min/max
PULSE
RC Forw/Rev
RC Left/Right
And a failsafe channel, (throttle on some receivers) to exceed guard band or to set a stop command) for some receiver types.
as a minimum. And calibrate each, configure correct settings both in roborun, and inside the script to match.
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Dannyboy » 10 Mar 2017, 22:04
by Dannyboy » 10 Mar 2017, 22:04
- Dannyboy
- Posts: 6
- Joined: 30 Oct 2012, 00:58
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 11 Jul 2017, 01:49
by Burgerman » 11 Jul 2017, 01:49
http://www.wheelchairdriver.com/gopro/test-control.mp4
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 14 Jul 2017, 15:00
by Burgerman » 14 Jul 2017, 15:00
http://www.wheelchairdriver.com/gopro/bot.mp4 250mb.
Still got good control. Both steer and backward/forwards axis are seperated and pure. And the motor load compensation works now without external current sensors.
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 14 Jul 2017, 19:03
by LROBBINS » 14 Jul 2017, 19:03
- LROBBINS
- Posts: 5553
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 14 Jul 2017, 19:29
by Burgerman » 14 Jul 2017, 19:29
But I have about 10% of stick travel before any compensation kicks in under load. And it does so very suddenly. No matter what settings. So that once on the deck, it will not zero turn with a small stick movement. As I add more stick, beyond about 6mm compensation suddenly kicks in and it turns.
It didn't do that with current sensors and was very smooth and powerful. It isn't that theres anything wrong with the script, I think. Its just inherent in the roboteq current sensing on battery input. I dont think it reads anything at low currents.
Its not bad. As you can see by the vid. Remembering that it takes well under 1A (a tiny pulse-width) to go forwards, and about 7A or more (about 45% pulse-width) to turn on the spot and skid all 4 wheels. And it does both with equal sensitivity, and smoothness. So compensation works very well. If you pick it up and slow a wheel at low speeds by hand, it really fights you. But it does feel less controlled than before at initial "zero turn" start. As there is a wide compensation "dead-band".
-
Burgerman - Site Admin
- Posts: 65240
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Return to Everything Powerchair
Who is online
Users browsing this forum: shirley_hkg and 136 guests