CRITICALLY IMPORTANT WARNING!
*****************************************
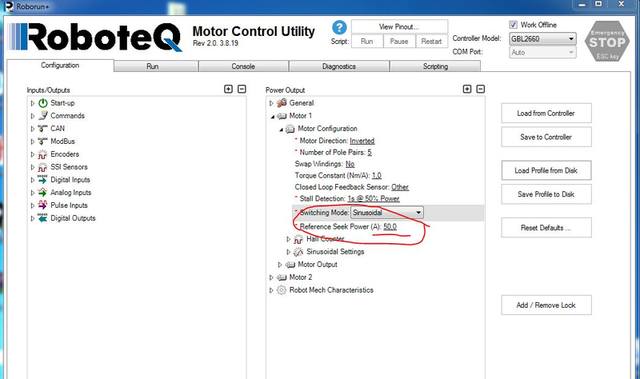
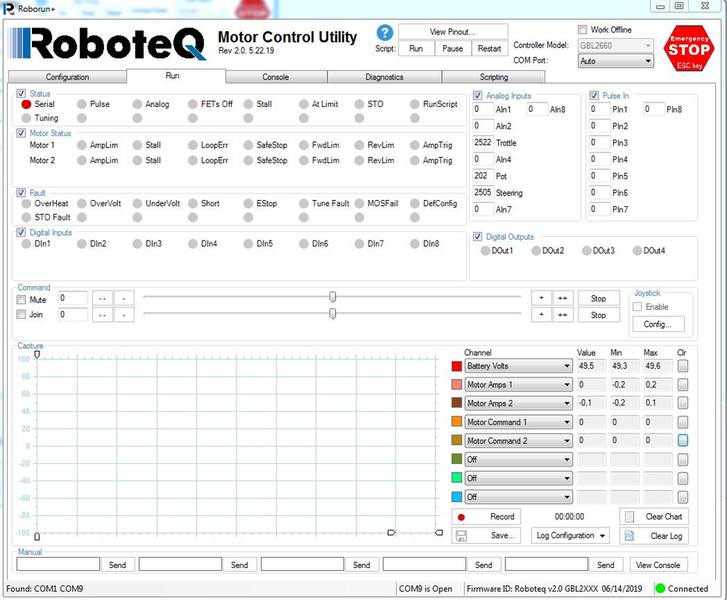
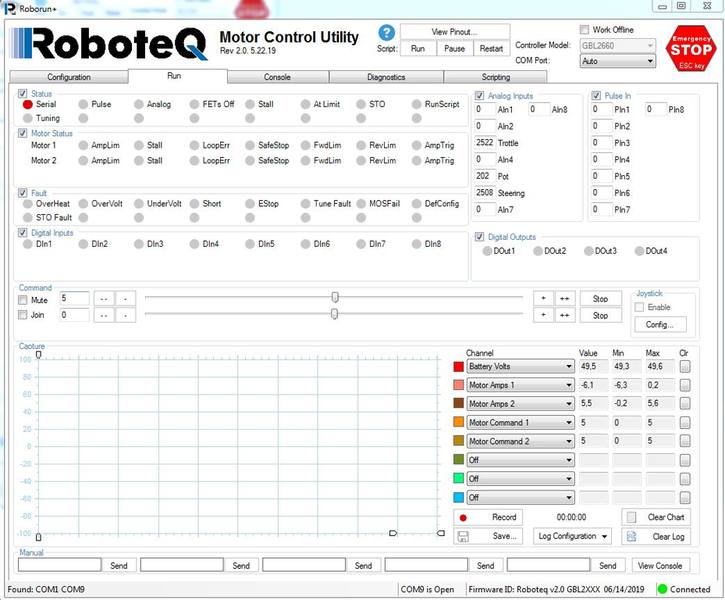
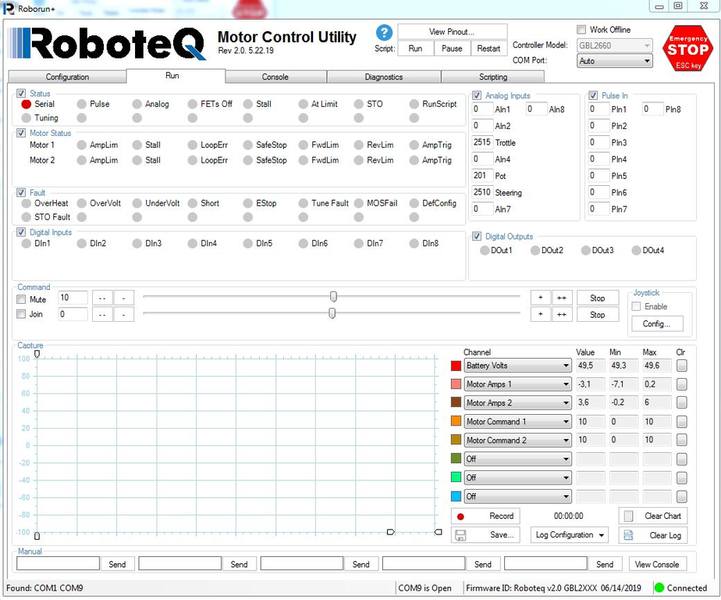
Vitolds has informed me that some newer Roboteq controllers now have motor current sensors. For example, the GBL2660 spec sheet says:
Measured Amps
The controller includes Amps sensors in line with the motor terminals and on the battery
ground terminals. Both Motor Amps and Battery Amps are therefore measured with precision.
The scripts I've written, both the analog and CANbus versions, do not take this into account.
There are three things to consider:
(1) With brushless motors you cannot connect external sensors so you MUST set "UseCurrentSensors = FALSE".
(2) The "FindEstimatedCurrents:" subroutine improves motor compensation for controllers that ESTIMATE motor current from battery current sensors. If your controller has motor current sensors, you MUST NOT use this option either.
(3) For controllers that do MEASURE motor current, we need a third option. These need to use the Roboteq motor current values directly without any corrections. I will modify the programs so that they give this third option. But please be patient. This should not be a difficult programming task, but it will take me some time.
If you have a controller that has built-in motor current sensors, DO NOT USE MOTOR COMPENSATION until I add the third option. The easiest way to do this is to comment out the line:
- Code: Select all
GoSub MotorCompensation
Using MotorCompensation without external motor current sensors in a controller that MEASURES (rather than estimates) motor current could damage the controller and/or the motors!