There's no way to desulfate a battery. There are thousands of snake oil devices out there, And chargers with a "desulfate" setting or stage. Its all marketing or bullshit.
When you discharge a battery part of that reaction is to split the acid, and turn it into water. The acid part turns to Lead Sulfate and lead dioxide. And ends up as a coating of nano sized crystals - a very fine powder - coating the plates. This naturally gets re-converted back to acid as you recharge the battery. If recharging cannot do this, then nothing ever can. Over time more and more gets left behind because some of it turns into larger non conducting (meaning its not affected by electricity or not enough to break down the crystals). This happens more when warm, and happens faster the more discharged they are and the longer you leave it the worse it becomes. And it does other damage too. It wrecks the plates through distortion as it expands unevenly, which also damages the separators and destroys the active plate material too.
So if a long slow normal charge at 14.4v max cant fix it, then nothing ever can. No amount of funny waves, frequencies, pulses, negative pulses, etc do a damned thing to help. Over what a normal charger can do. And even if they did, other problems will still remain such as the grid corrosion caused by trying to charge a sulfated battery.
PINNED - Roboteq Controller - developing for powerchairs
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 29 Nov 2014, 18:40
by Burgerman » 29 Nov 2014, 18:40
-

Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 29 Nov 2014, 18:47
by Burgerman » 29 Nov 2014, 18:47
For a while the biggest issue was time lag and sudden acceleration. It sounds like the current sensors have fixed that. Am I right?
It always had those. It may be that I have the acceleration set too high or too low and motor compensation set incorrectly. We will find out soon. The delay we are talking about wouldn't be noticed by most users if you have only used stock mobility products...
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by wilsonintexas » 29 Nov 2014, 20:31
by wilsonintexas » 29 Nov 2014, 20:31
I had to get a 6 volt charger anyhow. All of my other chargers are 12 volt only, so I want ahead and got one that had a "repair mode" It will not hurt. Right now, it is a suck and see. I will leave the rest of the battery questions for another thread.
I plan to use the controller you are discussing here, so the only stock item will be the motor.
I plan to use the controller you are discussing here, so the only stock item will be the motor.
- wilsonintexas
- Posts: 140
- Joined: 26 Aug 2014, 17:51
- Location: Dallas Texas
Re: Some thinking and questions about Roboteq
![]() by Williamclark77 » 29 Nov 2014, 20:46
by Williamclark77 » 29 Nov 2014, 20:46
My controller is the hbl2360. It is good to 60v. Fully charged my 14s pack is 50.4 volts. Within a minute of use that drops to 46.5v. It stays on 46.5v for the first 1/3 or so of discharge. Then it drops to 45.xx. I've never ran it below that point. I recently put 8.2 miles of VERY hard offroad use on it over the course of a day. It only used 25ah of the battery. My Permobile with 60ah mk gels batteries wont make it through about one mile of use under the same conditions.
Mine is brushless using industrial motors meant for - who knows what. Brushless is more efficient, but more complicated and finicky. They have issues with starting from a dead stop due to the basic design. Mine is perfect for me geared for a mathematical 13.5 mph (gps tested and rode next to an atv for a confirmed 13 mph of actual use speed). I am very light at 130 pounds and my chair is also. Haven't weighed it yet. If you are fat and/or heavy chair you would need much lower gearing for proper low rpm performance.
No parts list for the mechanical portion of mine. I machined all of it from solid stock. Lots of work but there was nothing else available to build what I wanted. Electrically our chairs are pretty similar except for the motor controllers, but they both use the same script and inputs for control. BM has the electronics listed on his BM3 build page.
If you do build something, don't skimp. You'll come out way cheaper buying quality components up front vs redoing it later Been there myself.
Mine is brushless using industrial motors meant for - who knows what. Brushless is more efficient, but more complicated and finicky. They have issues with starting from a dead stop due to the basic design. Mine is perfect for me geared for a mathematical 13.5 mph (gps tested and rode next to an atv for a confirmed 13 mph of actual use speed). I am very light at 130 pounds and my chair is also. Haven't weighed it yet. If you are fat and/or heavy chair you would need much lower gearing for proper low rpm performance.
No parts list for the mechanical portion of mine. I machined all of it from solid stock. Lots of work but there was nothing else available to build what I wanted. Electrically our chairs are pretty similar except for the motor controllers, but they both use the same script and inputs for control. BM has the electronics listed on his BM3 build page.
If you do build something, don't skimp. You'll come out way cheaper buying quality components up front vs redoing it later Been there myself.
-

Williamclark77 - Posts: 1183
- Joined: 21 Mar 2013, 01:18
- Location: South Mississippi, United States
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 29 Nov 2014, 21:09
by Burgerman » 29 Nov 2014, 21:09
I agree. Best of everything from the moment you start. There's no going back to replace/improve as its easier to start again. Aim for perfection. You need to be building a far BETTER chair than you can buy. Better engineered, better built, better designed, better thought out, and better build quality. Or it will end up worse than a bought one.
And that's hard because instead of a factory full of engineers with £££$$$ and multiple development versions developed by teams of people, with the motor, control system manufacturers etc all falling over themselves to help you, whereas you will only have you. And you are the expert in everything. And one go at this. Perfection down to the last washer and much thought is essential. I will stop building if I need a specific bolt rather than use something else. Then I will polish it.
Any parts I am not happy with get thrown out, and new better stuff ordered or remanufactured to a better design or standard. One less than well informed choice during a build, say a washer in the wrong place can leave you with a mass of problems later, or just something that looks rough. A dozen such errors of judgment means a useless chair that requires that you start again. This is why I worry every time someone says they are going to get one (some?) made by some mechanic or "engineer". I have seen the results! Usually not good.
And that's hard because instead of a factory full of engineers with £££$$$ and multiple development versions developed by teams of people, with the motor, control system manufacturers etc all falling over themselves to help you, whereas you will only have you. And you are the expert in everything. And one go at this. Perfection down to the last washer and much thought is essential. I will stop building if I need a specific bolt rather than use something else. Then I will polish it.
Any parts I am not happy with get thrown out, and new better stuff ordered or remanufactured to a better design or standard. One less than well informed choice during a build, say a washer in the wrong place can leave you with a mass of problems later, or just something that looks rough. A dozen such errors of judgment means a useless chair that requires that you start again. This is why I worry every time someone says they are going to get one (some?) made by some mechanic or "engineer". I have seen the results! Usually not good.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Williamclark77 » 30 Nov 2014, 18:37
by Williamclark77 » 30 Nov 2014, 18:37
Recorded this yesterday. I put roughly 9 or 10 miles on her over two days without charging. Hard miles on steep hills and lots of slow going in thick woods mixed with 1/3 of a mile runs across this rough cow field. Lots of that with a 50 lb child in my lap. It's on charge now. It was still sitting on 45.8 volts, which is usually what it's on after using about 25ah. Not bad at all. I'm thoroughly pleased. My Permobile can make two trips across this field before it's DEAD, and I have to stop several times to let it cool. I made 7 or 8 passes across it with several hours and several miles worth of running in the cow trails in the woods at the end. Never once ran hot nor had to stop for any chair related reason.
Click to play. That aluminum piece you see in the bottom left corner is the bearing cap on the front swingarm. Camera is mounted fixed on the seat base. That piece moving is the suspension working up and down.

Same video. Just also uploaded to Vimeo because some computers don't like to play videos from my site. Flash is disabled on here so that could be one reason why. Videos can't be embedded to play without opening them in another window. Html is over my head.
http://vimeo.com/113183361
Click to play. That aluminum piece you see in the bottom left corner is the bearing cap on the front swingarm. Camera is mounted fixed on the seat base. That piece moving is the suspension working up and down.
Same video. Just also uploaded to Vimeo because some computers don't like to play videos from my site. Flash is disabled on here so that could be one reason why. Videos can't be embedded to play without opening them in another window. Html is over my head.
http://vimeo.com/113183361
-
Williamclark77 - Posts: 1183
- Joined: 21 Mar 2013, 01:18
- Location: South Mississippi, United States
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 30 Nov 2014, 19:00
by Burgerman » 30 Nov 2014, 19:00
I thought you were going to cross that pond for a minute.
With off road ability, more power and speed, and range, it makes you wonder what all the big manufacturers are spending their huge development budgets on, and what all those teams of advisors and development departments and expert suppliers etc. are actually doing for the last 10 or 15 years doesn't it.
With off road ability, more power and speed, and range, it makes you wonder what all the big manufacturers are spending their huge development budgets on, and what all those teams of advisors and development departments and expert suppliers etc. are actually doing for the last 10 or 15 years doesn't it.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Williamclark77 » 30 Nov 2014, 19:25
by Williamclark77 » 30 Nov 2014, 19:25
I doubt it would do too well underwater  Although, I have submerged it by accident over the tires. It survived and didn't miss a beat.
Although, I have submerged it by accident over the tires. It survived and didn't miss a beat.
Oh, all of those dogs are not mine. Every dog in the neighborhood comes running now when they see my car coming down the road. They all know we're about to go do something fun.
I really didn't think the "offroad/outoor" chairs were that limiting until using this chair. I've been able to access places that I haven't seen in years. Not to mention having enough power to use the chair to plant my deer food plots and pull a tow-behind mower to cut my own grass vs paying folks to do it (and do it crappy).
It really is sad that we can build much more capable chairs on a cheap beer budget than is available from manufacturers with more financial resources to develop one chair than I have made in my lifetime.
I really think that with a few safety additions to save the chair from the user and user from the chair that mine could be manufactured at no more cost than a typical high end chair. As is with no tilt inhibits (nothing slows my chair when tilted nor stops me from tilting it too far and crushing wires except common sense and a 5 amp fuse), high tiny wheelie bars, "complicated" charging, and a few little things, it's a bit too extreme for any dummy to use safely. But nothing that can't be easily added to the start of designing.
I do wish I could try one of your BM2 chairs to compare programming. My Willchair feels fantastic now. However, all I have to compare it to is what I've had. It might could be better and I just don't know it.
Oh, all of those dogs are not mine. Every dog in the neighborhood comes running now when they see my car coming down the road. They all know we're about to go do something fun.
I really didn't think the "offroad/outoor" chairs were that limiting until using this chair. I've been able to access places that I haven't seen in years. Not to mention having enough power to use the chair to plant my deer food plots and pull a tow-behind mower to cut my own grass vs paying folks to do it (and do it crappy).
It really is sad that we can build much more capable chairs on a cheap beer budget than is available from manufacturers with more financial resources to develop one chair than I have made in my lifetime.
I really think that with a few safety additions to save the chair from the user and user from the chair that mine could be manufactured at no more cost than a typical high end chair. As is with no tilt inhibits (nothing slows my chair when tilted nor stops me from tilting it too far and crushing wires except common sense and a 5 amp fuse), high tiny wheelie bars, "complicated" charging, and a few little things, it's a bit too extreme for any dummy to use safely. But nothing that can't be easily added to the start of designing.
I do wish I could try one of your BM2 chairs to compare programming. My Willchair feels fantastic now. However, all I have to compare it to is what I've had. It might could be better and I just don't know it.
-
Williamclark77 - Posts: 1183
- Joined: 21 Mar 2013, 01:18
- Location: South Mississippi, United States
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 30 Nov 2014, 21:16
by Burgerman » 30 Nov 2014, 21:16
I think it could. But only a little. But we will be working on this soon. I just don't want to get mine all covered is salt and crud!
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Williamclark77 » 01 Dec 2014, 00:15
by Williamclark77 » 01 Dec 2014, 00:15
Back fully charged and balanced to within .003 volts in 168 minutes. I let it cook another 20. It took right at 28ah to refill her. Barely half of the battery was used. Two days of HARD use over 9-10 miles (I didn't gps it all) without charging and topped back off in under 3 hours. Truly remarkable. I certainly hope this becomes available to all of those that need it soon. There's no excuse anymore.
-
Williamclark77 - Posts: 1183
- Joined: 21 Mar 2013, 01:18
- Location: South Mississippi, United States
Re: Some thinking and questions about Roboteq
![]() by greybeard » 01 Dec 2014, 00:56
by greybeard » 01 Dec 2014, 00:56
That was an impressive video.
- greybeard
- Posts: 1152
- Joined: 28 Aug 2014, 20:15
- Location: Dorset, UK
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 01 Dec 2014, 01:23
by Burgerman » 01 Dec 2014, 01:23
There wasn't an excuse a decade ago.
But they don't bother. The manufacturers make new models (a new frame with all the same industry standardised parts) about every 2 or 3 years. For 15 years at least. But everything remains the same. Standardised wheels with standardised 300 x 8 tyres and small casters, all with tubes or solid, standardised control systems, standardised lead batteries, standardised everything. They change colours, the "screen" we don't want and doesn't do anything, and add cup and bible holders... They use dumb slow chargers, inaccessible programmers and send everything out with unusable settings we are not allowed to change. And as nose heavy as hell.
But in a range of fancy colours! Really??? Its 2014!
But they don't bother. The manufacturers make new models (a new frame with all the same industry standardised parts) about every 2 or 3 years. For 15 years at least. But everything remains the same. Standardised wheels with standardised 300 x 8 tyres and small casters, all with tubes or solid, standardised control systems, standardised lead batteries, standardised everything. They change colours, the "screen" we don't want and doesn't do anything, and add cup and bible holders... They use dumb slow chargers, inaccessible programmers and send everything out with unusable settings we are not allowed to change. And as nose heavy as hell.
But in a range of fancy colours! Really??? Its 2014!
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by rollingcowboy » 01 Dec 2014, 08:58
by rollingcowboy » 01 Dec 2014, 08:58
"I certainly hope this becomes available to all of those that need it soon. There's no excuse anymore."
all of you guys, BM, Will, Lenny,....... (many more) have been changing the paradigm of what a power chair can be and now it is there for the world to see!
CONGRATULATIONS
and, wow does that front caster suspension look good!
is the chair really that smooth over the rough ground? or is there some camera stabilization contributing there - very impressive either way.
would you mind posting again the brand/source of the front spring/shocks? thanks
all of you guys, BM, Will, Lenny,....... (many more) have been changing the paradigm of what a power chair can be and now it is there for the world to see!
CONGRATULATIONS
and, wow does that front caster suspension look good!
is the chair really that smooth over the rough ground? or is there some camera stabilization contributing there - very impressive either way.
would you mind posting again the brand/source of the front spring/shocks? thanks
- rollingcowboy
- Posts: 349
- Joined: 16 Feb 2012, 08:56
- Location: Denver, CO
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 01 Dec 2014, 10:40
by Burgerman » 01 Dec 2014, 10:40
His camera is fixed to the seat frame. It also moves.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by popschief » 01 Dec 2014, 19:33
by popschief » 01 Dec 2014, 19:33
If I lived there and had Will's chair the only way they would get me to leave is in a pine box. 
bp
bp
-

popschief - Posts: 377
- Joined: 08 May 2011, 04:00
- Location: Linden, California
Re: Some thinking and questions about Roboteq
![]() by Williamclark77 » 01 Dec 2014, 22:27
by Williamclark77 » 01 Dec 2014, 22:27
Thanks very much! It was a lot of work. I still have some little things left to do. The major portion is done and it's completely usable as a daily chair. I will be in it full time once I get the lockdown mechanism installed in my car. I've built it. Just waiting to be installed.
The shocks are DNM brand. I think they're mountain bike shocks. I pirated them from a junk Permobile Street.
The camera is mounted fixed on the seat pan. It's no Cadillac, but rides MUCH smoother than any other powerchair I've tried. The rear tires are run at low psi and act like suspension also. I was running them at 3 psi. Very cushy. Too low though. I popped one off the rim the morning before recording that video (I wasn't in the chair. Leaned it over to check the suspension bolts). 5 to 6 psi feels good and shouldn't let them fold over and pop off again.
Crappy cellphone picture of the camera mounted. http://www.willsjunk.com/photos/i-BXs4G ... GTt-XL.jpg I did have the bracket flipped over to make the cam 5 or so inches lower in the video.
The suspension takes some getting used to. It gives a rather wallowy feel as it moves vs the stiff rigid feeling of a standard chair. Lean over the side and the suspension compresses on that side. Same thing going sideways on a hill. I like it much better than rigid once I got used to it. My muscle spasms are less and my back doesn't hurt as bad after a day in it vs my Permobile.
I did a long detailed build thread. Read through it and ask questions there since this thread is for the Roboteq stuff. I need to update it anyway. I'm also adding a page for it on my website as time permits. That'll take a while. I have plenty more video that I haven't gotten around to editing.
Thanks again!
The shocks are DNM brand. I think they're mountain bike shocks. I pirated them from a junk Permobile Street.
The camera is mounted fixed on the seat pan. It's no Cadillac, but rides MUCH smoother than any other powerchair I've tried. The rear tires are run at low psi and act like suspension also. I was running them at 3 psi. Very cushy. Too low though. I popped one off the rim the morning before recording that video (I wasn't in the chair. Leaned it over to check the suspension bolts). 5 to 6 psi feels good and shouldn't let them fold over and pop off again.
Crappy cellphone picture of the camera mounted. http://www.willsjunk.com/photos/i-BXs4G ... GTt-XL.jpg I did have the bracket flipped over to make the cam 5 or so inches lower in the video.
{kind=link}
The suspension takes some getting used to. It gives a rather wallowy feel as it moves vs the stiff rigid feeling of a standard chair. Lean over the side and the suspension compresses on that side. Same thing going sideways on a hill. I like it much better than rigid once I got used to it. My muscle spasms are less and my back doesn't hurt as bad after a day in it vs my Permobile.
I did a long detailed build thread. Read through it and ask questions there since this thread is for the Roboteq stuff. I need to update it anyway. I'm also adding a page for it on my website as time permits. That'll take a while. I have plenty more video that I haven't gotten around to editing.
Thanks again!
-
Williamclark77 - Posts: 1183
- Joined: 21 Mar 2013, 01:18
- Location: South Mississippi, United States
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 01 Dec 2014, 23:41
by Burgerman » 01 Dec 2014, 23:41
You should invest is a set of allow hegar rims. They have a tight serrated bead that wont let the tyre pop off the rim. In fact you get the opposite problem when you want to swap a tyre. Pig to get off the beading.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by wilsonintexas » 01 Dec 2014, 23:49
by wilsonintexas » 01 Dec 2014, 23:49
I am reading the various threads trying to get a handle on parts lists. I am looking into the current sensors now..... and actually searched this thread on current sensors and there was a lot of discussion on 50 amp. 100 amp, rf suppression, and such. I also looked for the part number and all I cold find referenced was the chip itself, I cold not find a link to the assembled board.
so the dunb question(s). Do you really need them, or can you use the algorithm built into the controller based on battery current?
If you need them, which range is best? (some suggest using the 50amp ones so you get better lower crrent resolution, which is where you need it).
Lastly, any idea of a part number. if I search for the allegro current sensor, I keep finding links to the chip itself, not the board that I see you guys using. I understand the you would need to adjust the resistor to get the 5v needed,
as I said dumb questions.
so the dunb question(s). Do you really need them, or can you use the algorithm built into the controller based on battery current?
If you need them, which range is best? (some suggest using the 50amp ones so you get better lower crrent resolution, which is where you need it).
Lastly, any idea of a part number. if I search for the allegro current sensor, I keep finding links to the chip itself, not the board that I see you guys using. I understand the you would need to adjust the resistor to get the 5v needed,
as I said dumb questions.
- wilsonintexas
- Posts: 140
- Joined: 26 Aug 2014, 17:51
- Location: Dallas Texas
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 02 Dec 2014, 15:56
by Burgerman » 02 Dec 2014, 15:56
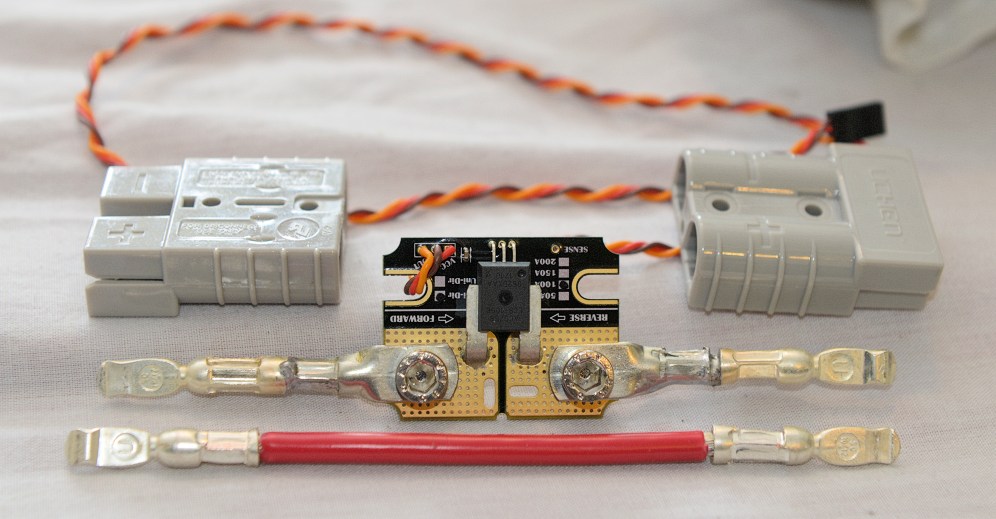
I often need 100A to turn... And am using a 150A controller. So am using 100A ones. They max out at 100A (give 5v or 0v). So you need reversible 100A ones. Ebay... china. Cheap!
Like these https://www.tindie.com/products/BBTech/ ... a150a200a/
Yes I think you need them. I get strange results using the built in calculated ones. They seem to not be able to identify accurately which motor is drawing the current on calculated...
Like these https://www.tindie.com/products/BBTech/ ... a150a200a/
Yes I think you need them. I get strange results using the built in calculated ones. They seem to not be able to identify accurately which motor is drawing the current on calculated...
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 02 Dec 2014, 16:28
by LROBBINS » 02 Dec 2014, 16:28
John,
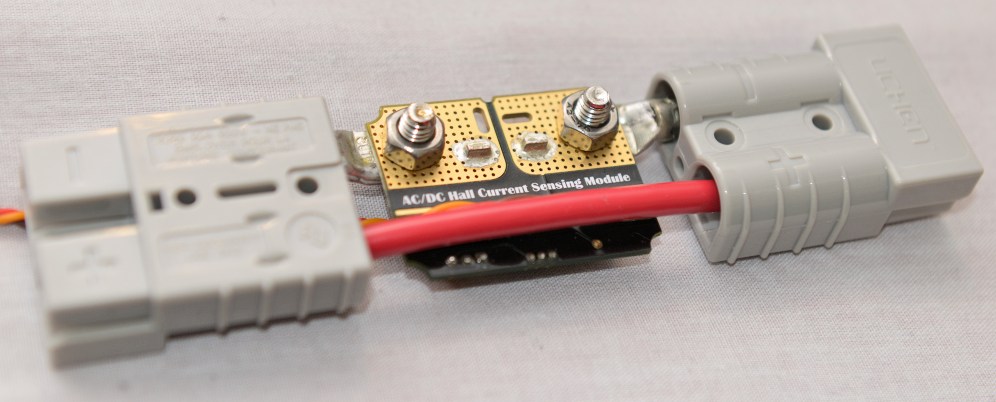
Do you have anymore of those sensors on hand and not all heat-shrink wrapped? I'd like to layout final versions of the power distribution boards for my system using these instead of my homemade mounting of the Allegro sensors, but I need dimensions. Either a drawing or a straight on photo would be quite precise enough for my needs.
Ciao,
Lenny
Do you have anymore of those sensors on hand and not all heat-shrink wrapped? I'd like to layout final versions of the power distribution boards for my system using these instead of my homemade mounting of the Allegro sensors, but I need dimensions. Either a drawing or a straight on photo would be quite precise enough for my needs.
Ciao,
Lenny
- LROBBINS
- Posts: 5807
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 02 Dec 2014, 16:42
by Burgerman » 02 Dec 2014, 16:42
Somewhere...
Give me 10 mins...
Give me 10 mins...
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 02 Dec 2014, 16:59
by Burgerman » 02 Dec 2014, 16:59
Failed! My camera went back for service 2 hours ago. Be back in about 4 to 5 days.
I have these already:
http://www.wheelchairdriver.com/BM3-con ... rimped.jpg
http://www.wheelchairdriver.com/BM3-con ... derson.jpg
http://www.wheelchairdriver.com/BM3-con ... shrink.jpg
http://www.wheelchairdriver.com/BM3-con ... r-rear.jpg
http://www.wheelchairdriver.com/BM3-con ... -parts.jpg
Not quite square on... Same width as an Anderson connector. I can post you a set if you want. This is a pair. They come as a row, 4 to a board, just snap off. One has my wires soldered on already, one just has them poked through.
I have these already:
http://www.wheelchairdriver.com/BM3-con ... rimped.jpg
{kind=link}
http://www.wheelchairdriver.com/BM3-con ... derson.jpg
{kind=link}
http://www.wheelchairdriver.com/BM3-con ... shrink.jpg
{kind=link}
http://www.wheelchairdriver.com/BM3-con ... r-rear.jpg
{kind=link}
http://www.wheelchairdriver.com/BM3-con ... -parts.jpg
{kind=link}
Not quite square on... Same width as an Anderson connector. I can post you a set if you want. This is a pair. They come as a row, 4 to a board, just snap off. One has my wires soldered on already, one just has them poked through.
- Attachments
-
- D8E_3940.jpg (265.31 KiB) Viewed 6951 times
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 02 Dec 2014, 19:41
by LROBBINS » 02 Dec 2014, 19:41
The first pic, from the IC side with the two andersons, should do. It's close enough to square to not be very distorted, and the Allegro's (for which I have dimensions) give me a good reference to scale things. Thanks.
Ciao,
Lenny
Ciao,
Lenny
- LROBBINS
- Posts: 5807
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 03 Dec 2014, 02:29
by Burgerman » 03 Dec 2014, 02:29
If you email your postal address I will stick a couple in an envelope.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by wilsonintexas » 03 Dec 2014, 06:39
by wilsonintexas » 03 Dec 2014, 06:39
I was just reviewing the user manual for the controller. It looks like we are using the current sensor and the torque technique for the motor control. (page 109 in the user manual) I am not second guessing, but trying to put 2 and 2 together. At this point I am just curious, trying to understand the programming.
It could be that we are not using any of the feedback loops described in the manual, and are doing straight motor control.
Again not trying to second guess, just starting out at ground zero and trying to understand. I fully understand if this needs to be dropped, or a different discussion. Just a newbe asking dumb questions.
It could be that we are not using any of the feedback loops described in the manual, and are doing straight motor control.
Again not trying to second guess, just starting out at ground zero and trying to understand. I fully understand if this needs to be dropped, or a different discussion. Just a newbe asking dumb questions.
- wilsonintexas
- Posts: 140
- Joined: 26 Aug 2014, 17:51
- Location: Dallas Texas
Re: Some thinking and questions about Roboteq
![]() by LROBBINS » 03 Dec 2014, 09:21
by LROBBINS » 03 Dec 2014, 09:21
Hi Wilson,
No, on a wheelchair you don't want torque control. That provides constant torque when what we need is constant speed and varying torque which is (approximately) provided by motor compensation. We are using the same kind of current sensors described in the Roboteq manual, but Roboteq neither provides nor discusses motor compensation which has been implemented in the script. What motor compensation does is use current to estimate motor load (actually, to estimate the back EMF of the motor) and adds "just enough" extra motor output to keep the speed almost constant as load increases. "Almost" because it's a positive feedback loop and if you overdo it you can get a runaway condition.
We are not using any form of closed-loop feedback. If that is needed, and for some users it might be, one has to add an encoder or tachometer or gyroscope and use a closed-loop speed mode. The disadvantage of using a closed loop is that it pretty much completely removes driving feel even when well-programmed.
Ciao,
Lenny
No, on a wheelchair you don't want torque control. That provides constant torque when what we need is constant speed and varying torque which is (approximately) provided by motor compensation. We are using the same kind of current sensors described in the Roboteq manual, but Roboteq neither provides nor discusses motor compensation which has been implemented in the script. What motor compensation does is use current to estimate motor load (actually, to estimate the back EMF of the motor) and adds "just enough" extra motor output to keep the speed almost constant as load increases. "Almost" because it's a positive feedback loop and if you overdo it you can get a runaway condition.
We are not using any form of closed-loop feedback. If that is needed, and for some users it might be, one has to add an encoder or tachometer or gyroscope and use a closed-loop speed mode. The disadvantage of using a closed loop is that it pretty much completely removes driving feel even when well-programmed.
Ciao,
Lenny
- LROBBINS
- Posts: 5807
- Joined: 27 Aug 2010, 09:36
- Location: Siena, Italy
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 03 Dec 2014, 16:55
by Burgerman » 03 Dec 2014, 16:55
Apart from the "feel" being missing, which means you can crush your toes for eg while trying to open a door, or flip the chair easily etc, if for some reason the feedback system fails, or develops a bad connection, you also get a runaway at full power usually. It turn your motor into a servo.
If you want to know how awful this feels, try using any chair with accutrack or truetrac or whatever each manufacturer calls their version. This is a closed loop system. Some users have no choice. Those with good hand and joystick skills usually hate it.
If you want to know how awful this feels, try using any chair with accutrack or truetrac or whatever each manufacturer calls their version. This is a closed loop system. Some users have no choice. Those with good hand and joystick skills usually hate it.
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Re: Some thinking and questions about Roboteq
![]() by wilsonintexas » 03 Dec 2014, 23:30
by wilsonintexas » 03 Dec 2014, 23:30
Thanks for the replies.
I am headed off to New Zealand for a few weeks. I hope to do ore reading and planning while I am there. So more dumb questions to follow..... But not for a few days.
I am headed off to New Zealand for a few weeks. I hope to do ore reading and planning while I am there. So more dumb questions to follow..... But not for a few days.
- wilsonintexas
- Posts: 140
- Joined: 26 Aug 2014, 17:51
- Location: Dallas Texas
Re: Some thinking and questions about Roboteq
![]() by wilsonintexas » 13 Dec 2014, 20:57
by wilsonintexas » 13 Dec 2014, 20:57
This thread has been quiet for a few days. I take it that the latest script is working for e3veryone?
Got to New Zealand, but one ofthe lap tops died, and it was mine. So now I have to beg time from my wife to get online. This is limiting the work I was planning on doing tetting a parts list abnd wiring diagram together.
Watching a one year onld grandson... for got how much attention they take. At least he is a happy one.
Got to New Zealand, but one ofthe lap tops died, and it was mine. So now I have to beg time from my wife to get online. This is limiting the work I was planning on doing tetting a parts list abnd wiring diagram together.
Watching a one year onld grandson... for got how much attention they take.
- wilsonintexas
- Posts: 140
- Joined: 26 Aug 2014, 17:51
- Location: Dallas Texas
Re: Some thinking and questions about Roboteq
![]() by Burgerman » 14 Dec 2014, 03:10
by Burgerman » 14 Dec 2014, 03:10
I am avoiding the cold and road crap... So yes but only indoors at the moment!
Seems pretty good with speed pot turned down to sane. Say 8mph. Its already better than any stock powerchair you have ever tested. But may need some more refinements when I get to use it in the dry in anger. Control and steering at what feels like double the 15mph it does is very much different to a normal slow chair. For eg it covers roughly about 5 times the stopping distance from 15mph, and if you use the same level of forward acc you use in a slow chair, it feels way too powerful... Like wheelies off the joystick by mistake at say 8 or 10 mph. Its easy to crash!
May need to moderate a few things or fine tune a few acceleration parameters yet. Remember it has some 300A total, x 45v capability (approx. 13.5kw or 18.2horsepower) at 8mph. If you let it. This needs toning down in programming a touch so you don't!
Seems pretty good with speed pot turned down to sane. Say 8mph. Its already better than any stock powerchair you have ever tested. But may need some more refinements when I get to use it in the dry in anger. Control and steering at what feels like double the 15mph it does is very much different to a normal slow chair. For eg it covers roughly about 5 times the stopping distance from 15mph, and if you use the same level of forward acc you use in a slow chair, it feels way too powerful... Like wheelies off the joystick by mistake at say 8 or 10 mph. Its easy to crash!
May need to moderate a few things or fine tune a few acceleration parameters yet. Remember it has some 300A total, x 45v capability (approx. 13.5kw or 18.2horsepower) at 8mph. If you let it. This needs toning down in programming a touch so you don't!
-
Burgerman - Site Admin
- Posts: 71117
- Joined: 27 May 2008, 21:24
- Location: United Kingdom
Return to Everything Powerchair
Who is online
Users browsing this forum: No registered users and 445 guests