
Roboteq 36volt (50v
max). 150Amps (250 peak) per channel Powerchair Motor
Controller...
As used on my fast indoor + all terrain
Latest Powerchair
This controller was not originally
designed as a powerchair controller. It lacks the fine tuning
(programming) capability and the continual safety checking of a "real"
powerchair controller such as those supplied by PG Controls, Dynamic etc as used
in the powerchair industry.
Full Details PDF
and
Manufacturer site

But for those of us sick of the safety
Nazi attitude, lack of power or torque, or lack of different voltage capability
the Roboteq Controllers offer a real high power solution. They are
not however a simple plug and play option.
And some risk due to unknown failure modes remain. For e.g.
if a connection or input signal fails or an output transistor fails in the "on"
(shorted) condition the powerchair will simply go! Back, left or
right, forwards and it would not stop without some intervention. That is a worry
if you are near traffic, or in a busy public bar for e.g.
But many simple steps can be made to minimise this risk. And an
emergency "kill" button can be added just in case things go wrong.
So why use one then?
Well its about CONTROL and POWER! I build and modify my own powerchairs
since if you want any real speed, control, or indoor/outdoor capability there
simply isn't any choice. Speed and off road power takes much more than any
current powerchair control system has to offer. The BEST and most powerful
available system on the market is either the PG Controls R-net 120 Amp system
(24v 100 Amp with 120 "boost" for a few Secs) or the Dynamic DX2 with 90 amps
and a similar 120 amps for a few seconds. That's just NOT ANYTHING LIKE enough
power for a 8 MPH powerchair with a grown adult. And seriously unusable with an
even faster 12.75 mph powerchair such as my latest one
here
The new Roboteq 2450 H offers up to 50v
input.
That means it can easily use 3 deep cycle batteries in series, at a nominal 36v.
That means any given powerchair motor is capable of 50 percent greater speed
than it would be on 24v. And importantly it offers a true 150 Amps per channel
with a short term peak of 250 Amps per side or 300 (500 peak) Amps total...
So a nominal 14800 watts! That's approx double the power of the worlds best
powerchair controller. And then some! It is very low resistance and uses
huge power cables for greater efficiency too.
In addition it allows 3 different inputs to be directly used. I
had to build a special interface to allow me to use Radio Control to drive my
spare powerchairs about. The Roboteq allows you to plug a RC receiver in
directly. It also allows you to program, reprogram, and store your settings
directly on a PC. It also allows you to connect a laptop and log, graph,
store everything from battery voltages and amps, to controller temperatures,
input values etc as you drive. Very very flexible!
 But
it does mean making your own joystick "pod" using either an inductive, hall
effect, or other joystick. This can have a frequency, or DC voltage swing,
digital duty cycle output. All are catered for the choice is yours!
But
it does mean making your own joystick "pod" using either an inductive, hall
effect, or other joystick. This can have a frequency, or DC voltage swing,
digital duty cycle output. All are catered for the choice is yours!
I will use a simple voltage swing device as used on almost every
conventional powerchair. The joystick I ordered is an APEM hall effect
APEM - 3140RQ0124 - 2 AXES From RS Components, or Farnells
online. Mine is in the post!
PDF - Full Joystick Data
Opposite >>>
 My
home built pod will also need a 36v battery "fuel gauge" from eBay...
This works with 12v, 24v, 36v, or 48v. Its programmed by the supplier to suit
your batteries. In this case Odyssey AGM batteries. See pictures under
test below!
My
home built pod will also need a 36v battery "fuel gauge" from eBay...
This works with 12v, 24v, 36v, or 48v. Its programmed by the supplier to suit
your batteries. In this case Odyssey AGM batteries. See pictures under
test below!
 And
several switches need to be fitted.
And
several switches need to be fitted.
a) on off switch.
b) Slow speed with reduced power and sensitivity
c) Radio Control / Joystick choice.
d) Lights
So I ordered these "latching" illuminated
switches. In different colours. EBay... >>>
As far as the pod itself is concerned
I will use a small
alloy box also from eBay. This will be everything I need to allow me to use the
Roboteq controller for a power wheelchair.
This page will be updated as soon as everything arrives and I
connect everything up.
Roboteq now has all "Anderson" SF 50
connectors soldered and fitted. And while I was at it I fitted the matching
connectors on to the motors. And shortened the motor leads by 6 inches. And also
fitted some small "hobby" gold plated connectors for the small brake wires.
Because they don't corrode or oxidise easily. See below:
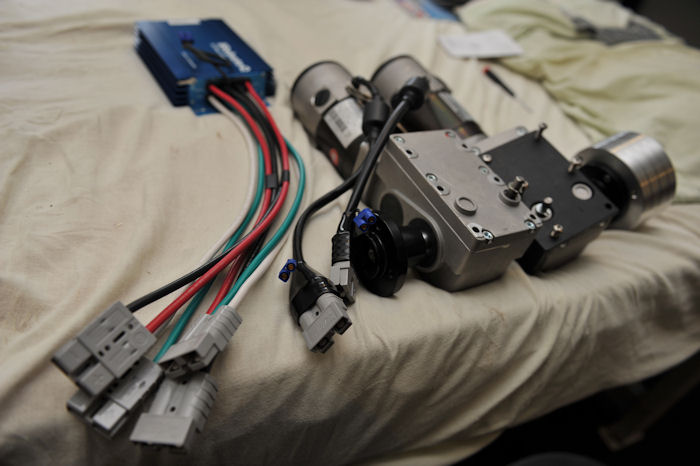
Detail - below:

So now everything plugs together neatly and the awful weedy
standard connectors fitted to the Groove motors have been cut off and thrown
away. These Anderson connectors are MUCH more robust and unlike the ones I
removed will not burn or melt... Notice the small blue gold plated brake
connectors too. I have yet to work out how to get the Roboteq
controller to operate these... But it is possible! On the groove motors this is
12v Don't use 24, or 36 as smoke will appear. Each brake takes 0.7 Amp (1.4A
total) at 12v measured.

Battery "meter" or fuel gauge arrived. On test here. This works
automatically on 12, 24, 36, or 48v
In this image it has ALL 6 Led's lit. And this is at 25.4v. Over
28.2V it decides to flash to indicate "over voltage" error. If the voltage is
reduced from here to 25.3v you lose the first light. Not suddenly, its "damped"
so as to not drop artificially under load such as when you accelerate. Works
really well!

At 23v (11.5 per battery) your battery is about as flat as you
would EVER want to go without real damage. So this gauge is perfectly calibrated
for my AGM batteries. I sent them the voltage details to program in when I
ordered this meter on eBay. Very efficient company. This meter needs only two
wires connecting. It draws so little current that it doesn't really ever need to
be turned off.
More soon.
As used on my fast indoor + all terrain
Latest Powerchair
