|
WheelchairDriver |
|
||
 |
| ||
|
WheelchairDriver |
|
||
|
|
| ||
|
REASONS WHY MOBILITY CONTROLLERS SUCK & ROBOTEQ IS BETTER! And some minor reasons why its NOT better!
1. Volts ROBOTEQ = Up to 50 battery Volts (I am using 45v from my huge lithium battery) Double the voltage of the mobility industry controllers. These are designed only for 24v maximum. This much higher Voltage allows an almost doubling of speed with NO range and NO torque penalty. (Using 24v to go this same speed would require a doubling of gearing ratio, resulting in half the range & torque) Or
as they say on EV forums, gear down, volt up! Lithium batteries and this
controller allows this. So effectively a doubling of efficiency. 2. Amps When there's a hill, a ramp, or when you want to lift the front wheels, AMPS really do matter! They matter even more the faster your powerchair is (gearing higher, so more Amps required for any movement at all speeds) The ROBOTEQ is 150 amps per motor. (250 Amps per motor surge capability). The best of the Mobility controllers can manage 100 Amps, with a just a few seconds boost to 120 Amps. Which is dismal! And inadequate in many situations. See
this video for proof of the AMPS a powerchair really needs!. ONE motor cable
here, runs through the Clamp Ammeter sat on my knee. It reaches the mobility
controllers limit VERY easily. 3. Power Power
is measured in watts. The RoboteQ can provide 150 Amps+ x 45 Volts in my
powerchair. That's per motor, or around 14kW! That's about 2.5 times as
powerful as the best mobility controller made The only way to make any normal powerchair provided by the big manufacturers steer properly, is to use an OEM level programmer on it. Which they will NOT SELL to you, and even if you can persuade them, its stupendously expensive! ROBOTEQ has online help, free programming software, updates to firmware, etc all included in the (much lower) price. Although some features that are
required to use this controller as a wheelchair controller are not
available in software. The Roboteq can do this stuff, Motor Compensation for
e.g. but it requires a complex SCRIPT (software routine) writing that the
Roboteq then runs in the background invisibly. Same with turn rates, reverse
speed etc. This is NOT plug and play like a wheelchair controller. Lenny, on my
forum, wrote this complex bit of code/script for me. My programming skills are
not quite up to this! But now working great. 5. Efficiency With higher
voltages you gain free speed, Almost double! (no loss of torque or range as
original gearing is used) and with some 32 output Mosfets devices, the internal
resistance is ultra low. The Roboteq doesn't get hot and shut down if used hard
like a typical mobility controller. 6. Many Digital, Analog Voltage, pulse, frequency,
duty cycle, inputs, outputs, and masses of configurability.
Including using feedback for position etc. 7. BUILT IN Radio Control capability (Auto Switching) I already drive my other power wheelchairs around by Radio Control. But I had to build a complex interface to do so. I use this daily, to take chairs to the workshop, to put a spare one in my van, etc etc. Its unbelievably useful. I cannot live without this capability now, and its built right in!
DETAILS My BM3's Lithium Ion Phosphate battery is a 78 cell pack. It uses 13 strings of 6 cells. These are connected in series. So the fully charged voltage is approx 47 volts and most of the days charge is at around 45 volts.
MOTOR BRAKE CONTROL So working voltage is 45Volts. The Roboteq controller is OK up to 50v or a little more. So we are good then? Well almost! The chairs lights are 12v. The chairs motor brakes are also 12 volts. The Roboteq controller has a digital output that can drive the brakes. Or at least switch the brakes. But not directly. It cannot handle the battery voltage directly and needs a solid state relay. So what happens is this. The Roboteq's 5v supply and its brake output switch a solid state relay directly. 40 to 60v input, 12v output inverter is then used, powered by the battery, but its output switched by the relay to control the motor brakes. Another relay is used and switched by another digital output, to turn on the inverter as soon as the RoboteQ is powered up. The inverter is the silver thing in the image below.
Top first, then left to
right... My home built joystick pod, using an APEM hall effect joystick
shown lower down, and 4 push buttons for RC mode,
MOTOR COMPENSATION and CONTROL THROW ADJUSTMENT On the face of it you can just buy a quality Analog joystick such as the APEM one shown in the photo above (PDF - Full Joystick Data) with a DC voltage swing and connect it directly to the Roboteq and you are good to go. Well if only life was so simple! This WILL in fact "work" in a badly controlled fashion. At least it will if you use really powerful motors, or/and 45 volts as I am doing here but it's really not ideal and control will be difficult unless you use really low impedance motors and higher battery voltages. Why? Because mobility controllers also have something called MOTOR COMPENSATION. What does this do? Well borrow a OEM programmer and set it to OFF and try driving your powerchair around. Then you will see! Its pretty important. Basically it gives you more torque at small joystick movements. Motor compensation is a software "helping hand" so to speak. Here's how it works: Your motor maybe draws 100 amps at full battery voltage. Or with a simple controller, at full joystick deflection. So you want to turn left. Your turn "rate" at full stick movement is programmed to say 50 percent. Or half power. This delivers HALF battery voltage (a 50 percent pulse width) to the motors. So you get half max torque. And so you may not move at all if this isn't adequate! You need a burst of 100 percent as a starting push, to get you moving. This is what motor compensation does. It senses the motor amps, and adds power to any motor that shows high amps (such as one struggling to cross a threshold, or trying to turn left on thick carpet). So it then adds extra power to any motor that needs it. This is accomplished by a clever bit of code that looks at the throttle position, and then motor amps, and then at acceleration. Setting this too high can cause a runaway situation, too low, and you get little torque without full stick deflection. There's a lot of bullshit talked about motor compensation, and measuring the motor resistance etc. No need, turn it up bit by bit, until it gets edgy or jerky, and then turn it down a little. That's it! So using the RoboteQ at say 24v without Motor Compensation running as a script, on the controller will result in a weak and not very nice to drive powerchair. In addition there's no way to individually control turn rate, or reverse speed, or reverse turn speed etc. These extra parameters were also added as user adjustable easy to understand figures inside the same script that is loaded onto the controller. These things together make the Roboteq a usable powerchair controller. Thanks to Lenny for my script! It was way beyond me! And about 150 lines of complex code.
See pictures above here for my compact one!
This can have a frequency, or DC voltage swing, digital
duty cycle output. All are catered for the choice is yours! I will use a simple voltage swing device as used on almost every
conventional powerchair. The joystick I ordered is an APEM hall effect APEM - 3140RQ0124 - 2 AXES From RS Components, or Farnells
online.
|
|
CONTROL, POWER, TORQUE, SPEED & RANGE!
By increasing the VOLTAGE to around 45 volts it means any given powerchair or motor motor is capable of almost double the speed than it would do on the usual 24v. So by using conventional HI-END 4 pole powerchair motor speeds can be hugely increased. Since the least stressful time on any motor is while "free running" this isn't particularly stressful! A motor draws the least power while free running, or while going fast in straight lines in a powerchair. A typical 6 MPH powerchair motor will do 12 mph on 48v But we have around 45v. So a 6 MPH motor will do about 10.5 mph. And an 8.5 Mph motor from a "Groove" powerchair as I am using will do 15 MPH all day long. And importantly the Roboteq offers a true 150 Amps per channel with a short term peak of 250 Amps per side or 300 (500 peak) Amps total... That's approx 2.5x the power of any mobility device. It is very low resistance and uses huge power cables for greater efficiency too. That 150 Amps per channel @ 45v means much more torque available on any given motor.. In addition it allows 3 different inputs to be directly used. I had to build a special interface for a "mobility controller" to allow me to use Radio Control to drive my spare powerchairs about. The Roboteq allows you to plug a RC receiver in directly. It also allows you to program, reprogram, and store your settings directly on a PC. It also allows you to connect a laptop and log, graph, store everything from battery voltages and amps, to controller temperatures, input values etc as you drive. Very very flexible indeed! I can graph and log the performance of my lithium batteries as I drive.
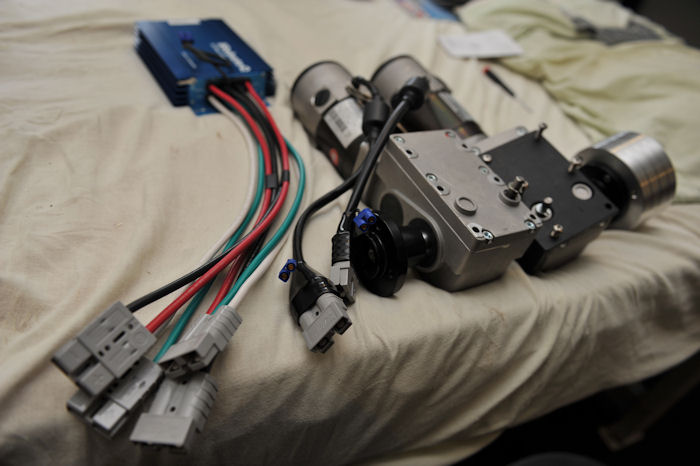
Blue Roboteq and my 8.5 mph motors (that will soon be running on 42v to 47v) all have the new Anderson connectors fitted and ready! Note the huge and doubled up battery cables on the RoboteQ! These are needed for the possible 500 Amp peak current! The motors run great on 36v and 48v. They just spin at double the speed! Quietly. So I don't expect any motor problems.
Close up, motor and brake connectors. Added to the Groove 8.5 mph motors. So now everything plugs together neatly and the awful weedy standard connectors fitted to the Groove motors have been cut off and thrown away. These Anderson connectors are MUCH more robust and unlike the ones I removed will not burn or melt... Notice the small blue gold plated brake connectors too. I have yet to work out how to get the Roboteq controller to operate these... But it is possible! On the groove motors this is 12v Don't use 24, or 36 as smoke will appear. Each brake takes 0.7 Amp (1.4A total) at 12v measured. Or connect them is series for .7 of an amp and 24v total.
This is a cheap 10 amp inverter. My batteries are between 40 and 50 volts. But I need a 12v supply for lights, and for motor brakes. The brake on each motor needs 0.7 Amps of power at 12v. The Inverter above has a 30v to 60v input range. Its output is an efficient smoothed 12v output. (11.78v measured). The Roboteq can switch this 12v on and off to work the brakes on the motors just like a mobility controller does automatically. RED is Battery voltage in. BLACK is ground. YELLOW is 12v out. Easy eh?
This plain black box is my Radio Control Receiver. It needs to be protected from water. It plugs permanently the RoboteQ controller, and operates anytime I turn on the matching RC Transmitter. All my powerchairs are RC capable as it makes moving them about for cleaning and loading into vehicles etc easy. The OTHER thing is my home built joystick pod. I hate the latest fashion of having a huge great pod, with TV or whatever built in! The perfect pod is waterproof, small as humanly possible, and serves no other purpose other than lights, on/off and driving the powerchair accurately! It contains an APM hall effect Joystick and a few switches. These control speed (slow/fast to make it legal for the public places etc) and lights, and power, and RC mode.
This rather heavy gauge bunch of cables is the battery wiring harness. It uses 4x 8 gauge (10 sq mm) cables! That's huge. It connects the Lithium battery pack to the RoboteQ 300 amp controller. No fuses or breakers are used here. This also has a connection that goes to the Inverter for 12v supply above. It will power the inverter via a solid state relay, turned on by the RoboteQ controller..
This is all of the above! Everything uses Anderson connectors, and seriously heavy cables... The RoboteQ will connect to the control pod, and to a USB lead ready to plug into any PC for control and for graphing battery, motor or changing programming settings.
The Lithium 3000+ Watt Hour 45v battery pack! Its got 3x the USABLE power of a set of large group 24 lead powerchair batteries! TO BE UPDATED -- FOR ANY QUESTIONS ASK ON THE FORUM OR FOR SCRIPT DETAILS EMAIL ME!
|
|
WHAT'S THE PURPOSE OF THIS PAGE IF IF I DON'T SELL THESE POWERCHAIRS? To embarrass the manufacturers into getting with the show, and doing some real development work. And to show other wheelchair users especially Paraplegics like me, what is actually possible and to show how bad most powerchairs really are. As such there are others now building the "same" or similar, or modifying powerchairs in one way or another. Many are members of my Message board
RELATED PAGES Anderson style connectors & why you need them Battery planning How to organise yourself
|
|
Content, Images, Software & Design (c) Burgerman 1996 & aggressively protected by whatever means neededed -- Message Board |
![]()



 MEANS
MAKING YOUR OWN JOYSTICK "POD" USING A QUALITY JOYSTICK MODULE.
MEANS
MAKING YOUR OWN JOYSTICK "POD" USING A QUALITY JOYSTICK MODULE.